Ở bài trước công ty chúng tôi đã phía dẫn các bạn chế tạo một loại xeđiều khiểntừ xa bằng Smartphone. Trong bài bác ngày hôm nay chúng tôi đang hướng dẫn chúng ta làm một dòng xe bao gồm khả năngtự độngtránh đồ gia dụng cản. Nghe thôi sẽ thấy độc đáo rồi yêu cầu không nào? bọn họ cùng bắt tay vào việc ngay thôi.
Bạn đang xem: Robot dò đường tránh vật cản
Chuẩn bị:
Một cỗ khung xerobot3 bánh
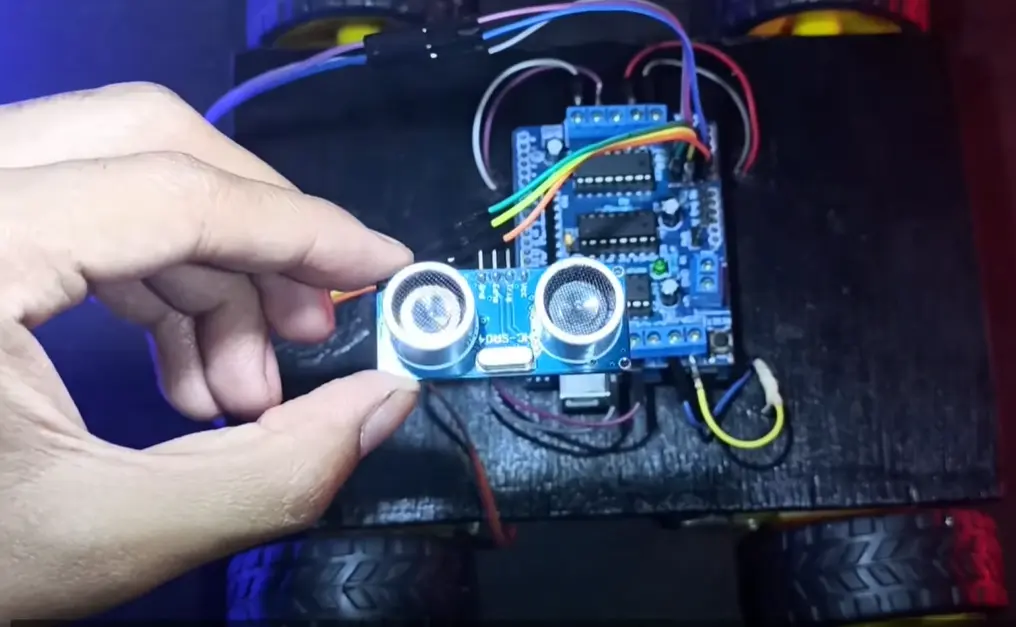
Một cảm biếnsiêu âm
SRF 04 hoặc SRF05
Một Broad Arduini UNO R3
Một module tinh chỉnh và điều khiển động cơ
Một Servo SG90
Khung đỡ cảm ứng siêu âm
Khung đỡ Servo
Dây nối đực-cái, chiếc -cái

Bước 1

Các các bạn hàn dây mang đến mô tơ kế tiếp lắp ráp bộ khung xe lại, phần lắp ráp này khá đơn giản.

Sau khi thêm ráp cỗ khung và hàn dây mang lại mô tơ xong họ sẽ được như thế này
Bước 2
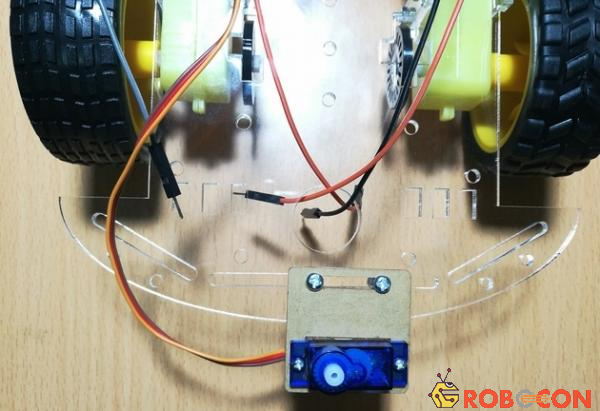
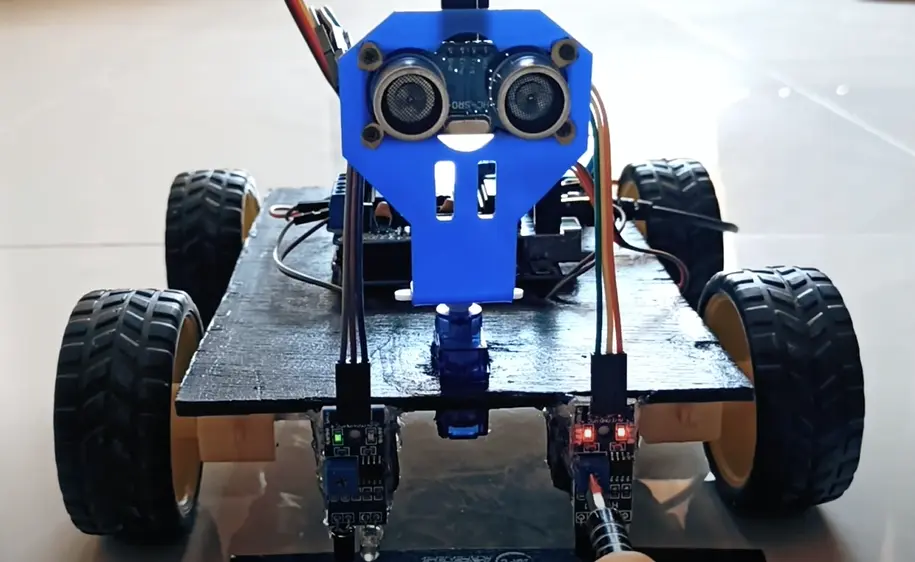
Tiếp theo chúng ta sẽ lắp động cơ servo lên khung xe. Chúng ta dùng cỗ khung cùng ốc dành riêng cho servo để cố định và thắt chặt lên khungrobot
Động cơ servo này có nhiệm vụ xoay cảm ứng siêu âm để giúp robot vạc hiện đồ cản ở các hướng.

Sau lúc đã cố định và thắt chặt Servo xong họ lắp khung đỡ cảm biến siêu âm lên servo. Các bạn có thể dùng keo dán nến cần dán phần khung đỡ cảm ứng siêu âm này với servo.
Bước 3

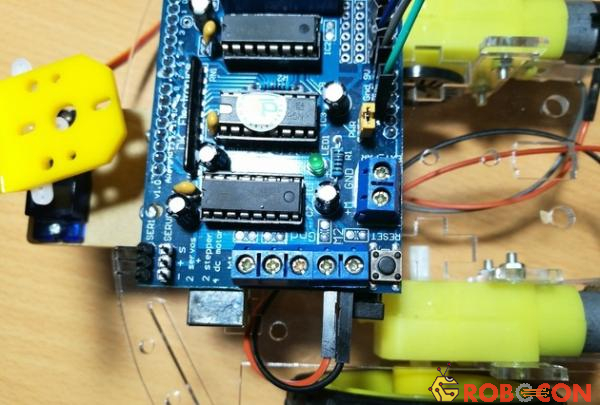
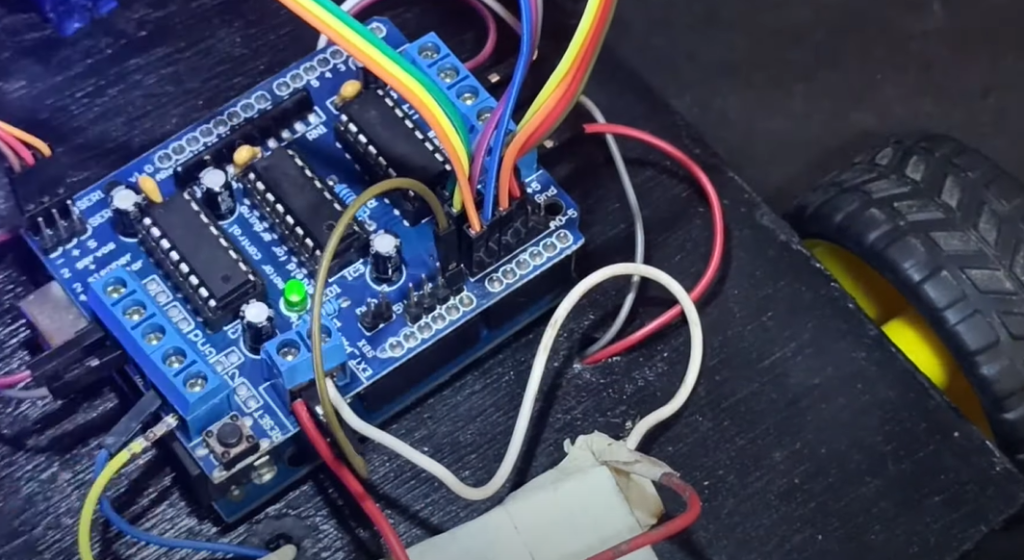
Do phải kê module L293 lên Broad Arduino như thế này nên bọn họ sẽ bị thiếu thốn chân gặm vào Arduino. Vị vậy bọn họ phải hàn thêm chân kết nối ở trên L293

Trên module L293 đã gồm lỗ ngóng sẵn các bạn chỉ bài toán đặt jump vào và dùng mỏ hàn lại.
Bước 4

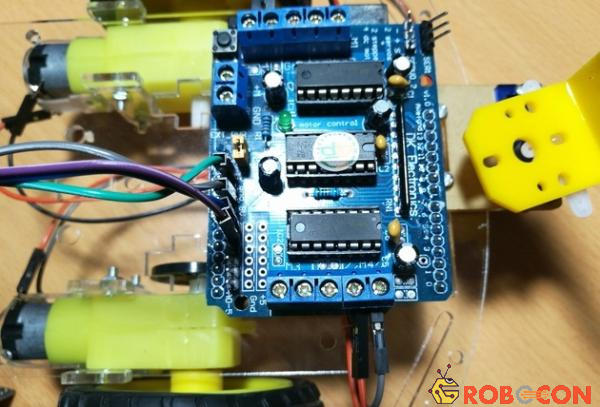
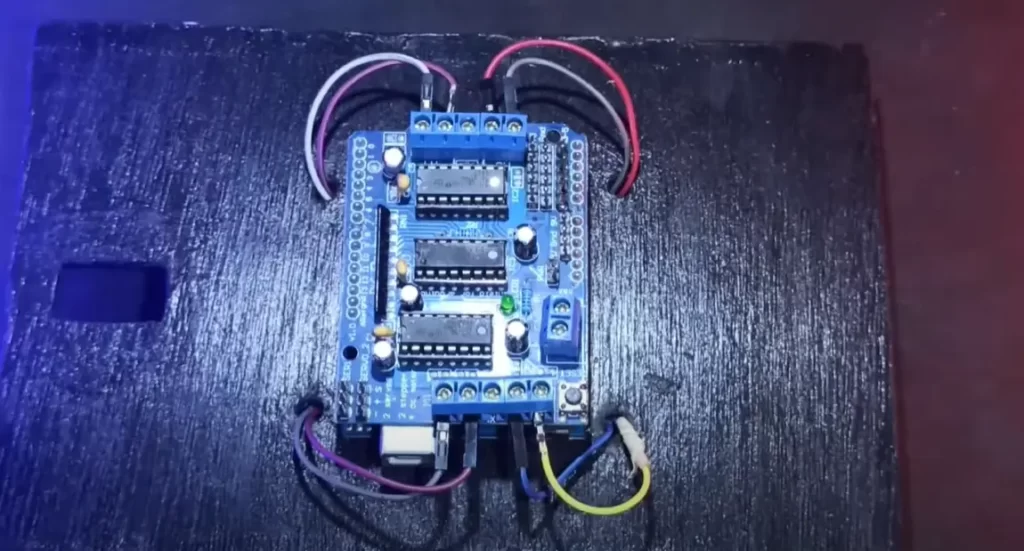
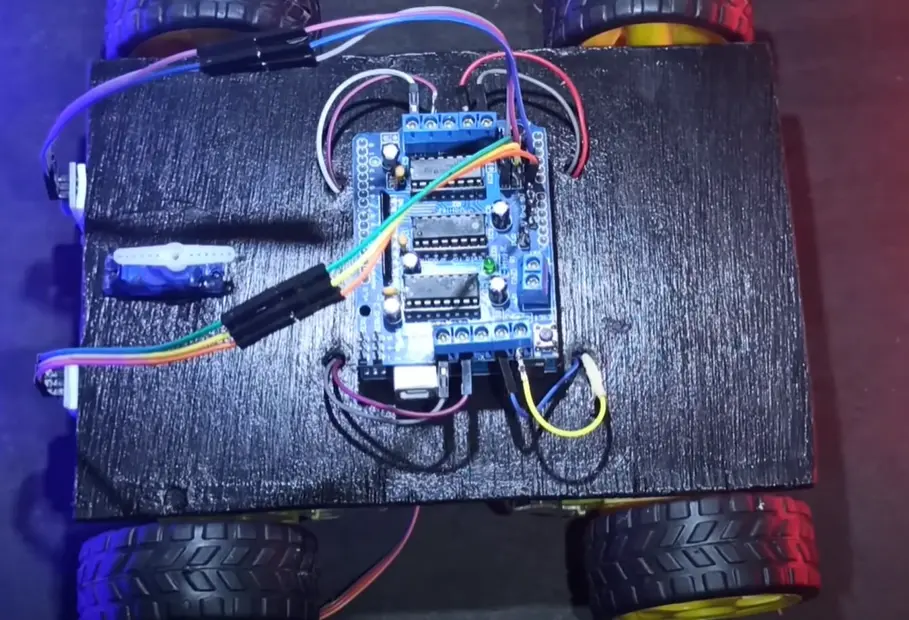
Các chúng ta dán Broad Arduno UNO R3 lên khung robot

Sau đó để Module L293 lên trên.
Bước 5
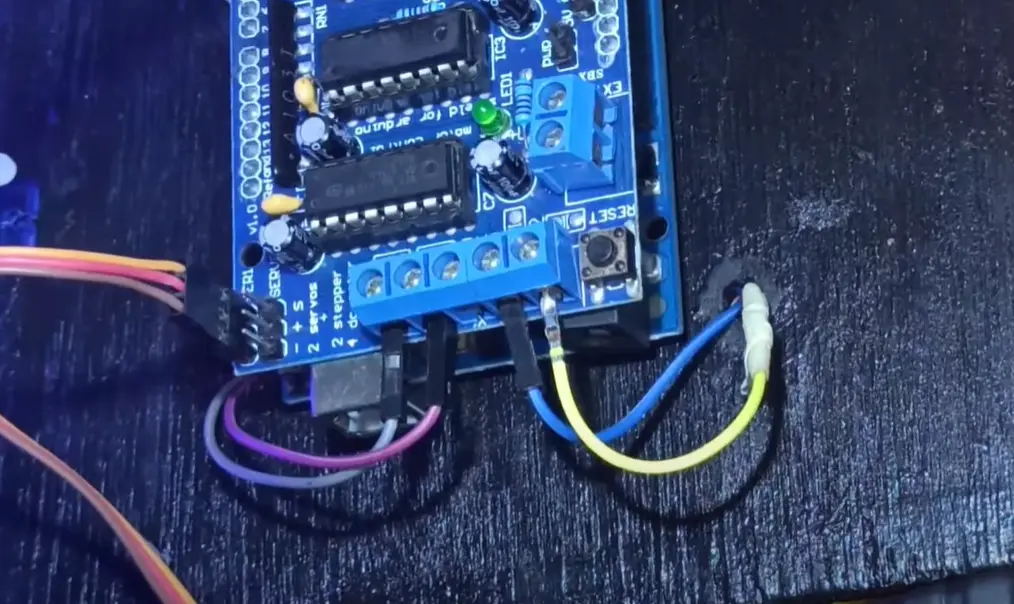
Tiếp theo chúng ta nối dây bộ động cơ vào cọc m2 và M4

Sau đó họ sẽ nối dây cho cảm biến siêu âm với Arduino
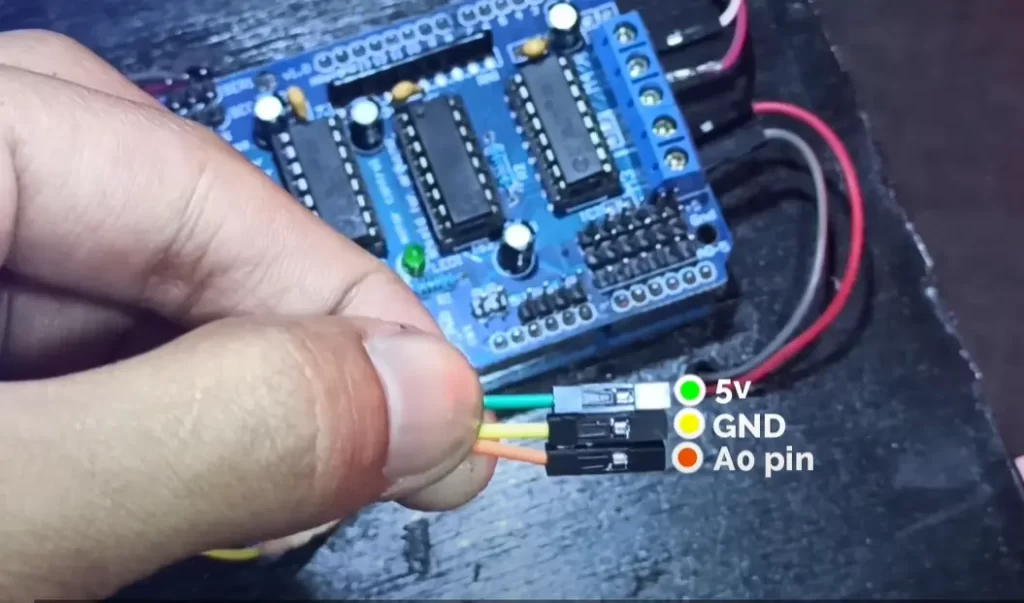
Dây GND nối cùng với GND, VCC nối cùng với 5V, Trig nối cùng với A0, Echo nối với A1
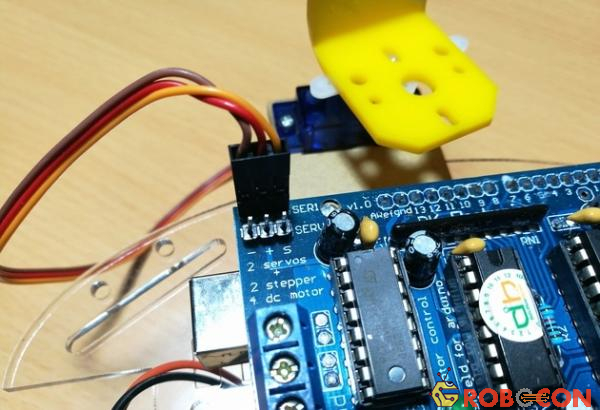
Và sau cuối là nối dây đến Servo hoạt động. Các bạn cắm dây của servo vào chân Jump bao gồm ghi SER1. Bên trên mạch có ghi những kí hiệu (- + và S, S là dây biểu lộ của servo) các bạn nhớ cắn cho đúng, dây biểu lộ của servo thường có màu vàng cam.
Robot dò Line Arduino là trong số những dự án độc đáo và thu hút cho sinh viên với những tình nhân thích nghành nghề dịch vụ robot. Bằng câu hỏi sử dụng nền tảng Arduino với các linh kiện điện tử phổ biến, các chúng ta cũng có thể tự thi công và chế tạo một robot dò line có tác dụng di chuyển và tránh giảm vật cản. Trong dự án công trình này, mình sẽ hướng dẫn áp dụng cảm biến hóa dò line và cảm biến khôn cùng âm HC-SR04 sẽ giúp robot phân phát hiện và tránh giảm vật cản trên phố đi.
Chỉ cần những kỹ năng cơ bạn dạng về lập trình cùng điện tử, sinh viên với những người yêu thích robot rất có thể dễ dàng tiếp cận và thực hiện dự án này. Rộng nữa, việc sản xuất robot dò line cũng giúp các bạn rèn luyện năng lực xử lý dữ liệu, xây dựng mô hình điều khiển và kiến tạo phần cứng.
Các linh kiện quan trọng cho dự án
| LINH KIỆN | SỐ LƯỢNG | MUA HÀNG |
| Arduino Uno R3 | 1 | Shopee | Cytron |
| Động cơ kim cương + Bánh xe | 4 | Shopee | Cytron |
| Module điều khiển và tinh chỉnh động cơ L293D | 1 | Shopee | Cytron |
| Servo SG90 | 1 | Shopee | Cytron |
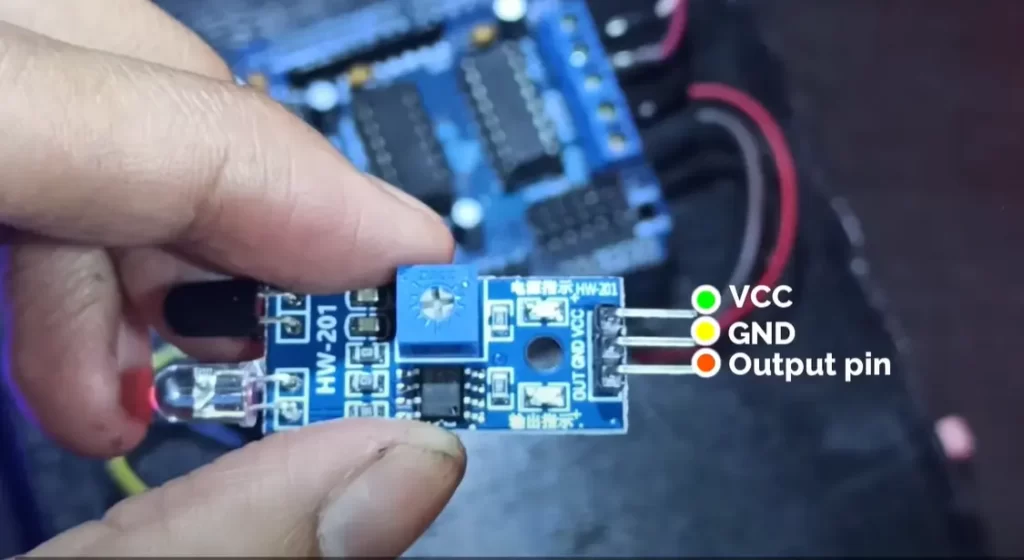
| Cảm đổi mới vật cản hồng ngoại | 2 | Shopee | Cytron |
| Cảm biến khoảng cách HC-SR04 | 1 | Shopee | Cytron |
| Khung đỡ cảm ứng siêu âm HC-SR04 | 1 | Shopee | Cytron |
| Pin 9V | 1 | Shopee | Cytron |
| Dây đế pin 9V | 1 | Shopee | Cytron |
| Dây nối 40P (Đực – Cái) | 1 | Shopee | Cytron |
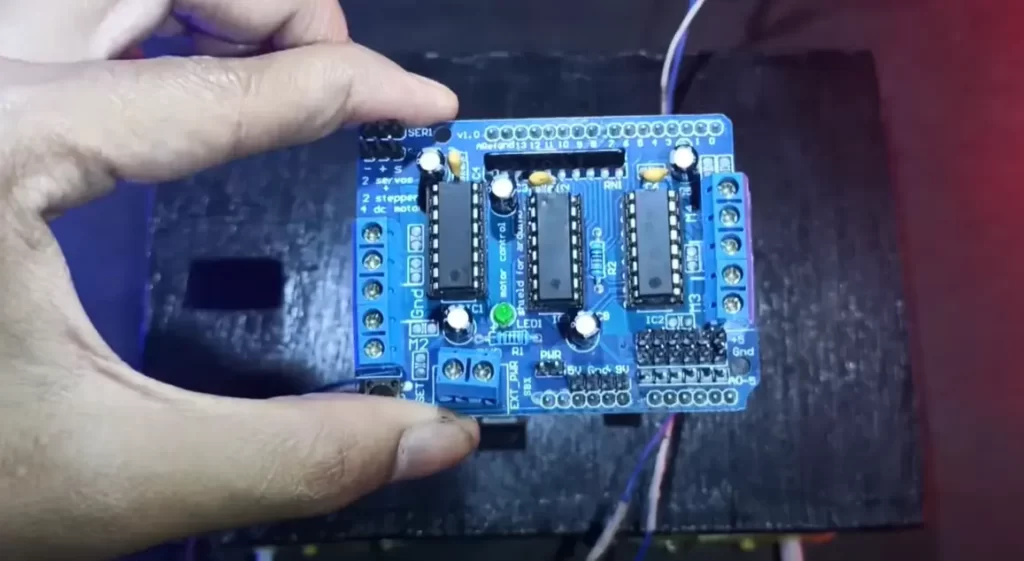
Motor Shield L293D
Motor Shield L293D là một trong những board tinh chỉnh và điều khiển động cơ mang đến Arduino, cho phép bạn điều hành và kiểm soát động cơ và những thiết bị khác dễ dàng hơn trải qua Arduino. Bộ điều khiển và tinh chỉnh này có thể điều khiển được bộ động cơ bước và hộp động cơ DC, mặt khác cũng hỗ trợ các thiết bị đầu vào như cảm biến, nút bấm và cả những loại module khác.
Xem thêm: Lời bài hát em sẽ là cô dâu lyric, lời bài hát em sẽ là cô dâu có karaoke, hợp âm
Bước 5: thực hiện lắp đặt cảm biến vật cản hồng ngoại
Tiếp hành lắp cảm biến vào đúng địa chỉ trên khung và liên kết với chân A0, A1 bên trên Shield Motor L293D.
Bước 6: lắp đặt bánh xe mang lại Robot dò line
Lắp toàn bộ 4 bánh xe vào đụng cơ.
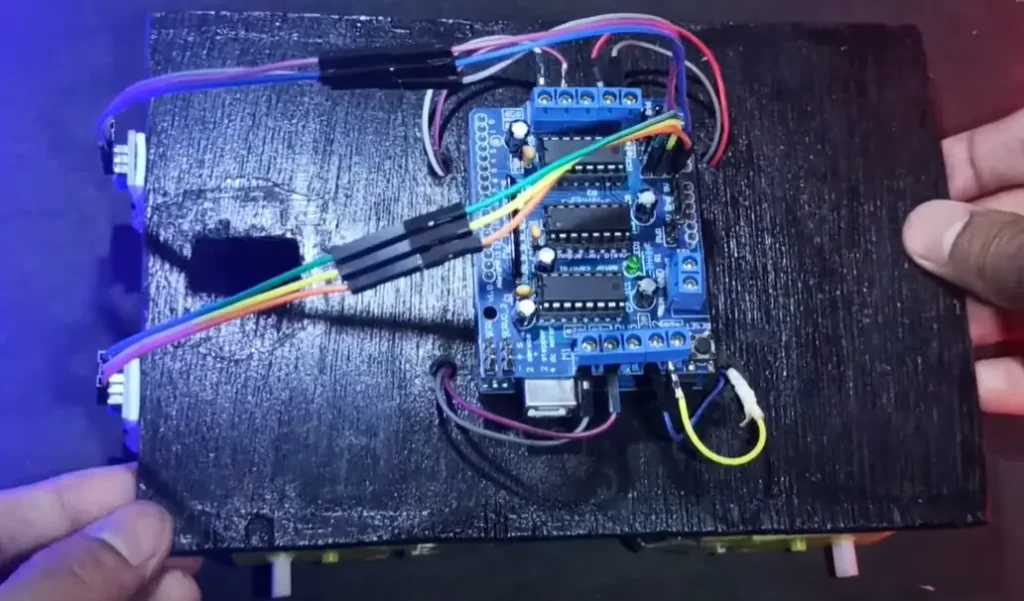
Bước 7: kết nối Servo SG90 cùng với Shield Motor L293D
Cố định Servo vào vị trí mình đã khoét trước đó, với kết nối các chân của Servo SG90 tương xứng với địa điểm Servo1 tất cả trên board mạch.
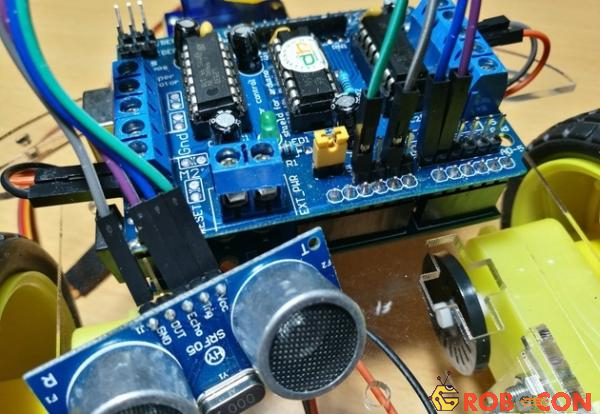
Bước 8: Kết nối cảm biến khoảng bí quyết HC-SR04 với Shield Motor L293D
Lắp đặt cảm biến khoảng biện pháp HC-SR04 vào Servo, thực hiện đấu nối các chân vào L293D (TRIG — A2, ECHO — A3, VCC — 5V, GND — GND)
Bước 9: cấp nguồn
Ở trên đây mình cần sử dụng nguồn 9V DC để cung cấp cho Shield Motor L293D, chúng ta chú ý giúp mình chân +M các bạn dùng thêm 1 Jumper liên kết với chân 9V nhé.

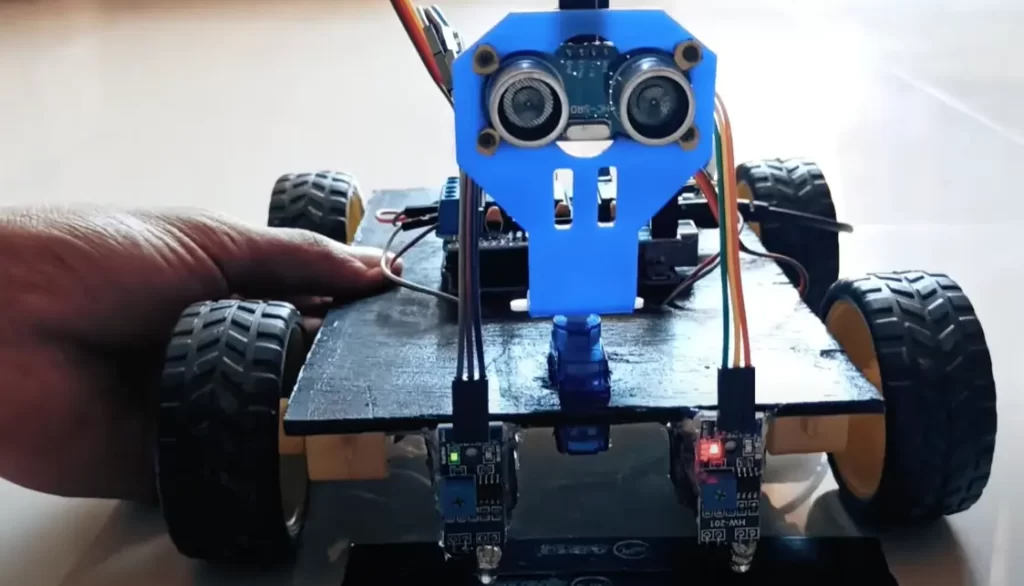
Bước 10: Hiệu chỉnh cảm biến vật cản hồng ngoại
Các bạn vẽ một đường vạch để 2 cảm ứng vật cản hồng ngoại vào bên trong đường line, dùng tua vít vặn biến chuyển trở gồm trên bo mạch cho đến khi cảm ứng chỉ còn xuất hiện 1 đèn giống như trên hình.
Code Robot dò line Arduino
#include #include #include //hc-sr04 sensor#define TRIGGER_PIN A2#define ECHO_PIN A3#define max_distance 50//ir sensor#define ir
Left A0#define ir
Right A1//motor#define MAX_SPEED 200#define MAX_SPEED_OFFSET 20Servo servo;New
Ping sonar(TRIGGER_PIN, ECHO_PIN, max_distance);AF_DCMotor motor1(1, MOTOR12_1KHZ);AF_DCMotor motor2(2, MOTOR12_1KHZ);AF_DCMotor motor3(3, MOTOR34_1KHZ);AF_DCMotor motor4(4, MOTOR34_1KHZ);int distance = 0;int left
Distance;int right
Distance;boolean object;void setup() Serial.begin(9600); pin
Mode(ir
Left, INPUT); pin
Mode(ir
Right, INPUT); servo.attach(10); servo.write(90); motor1.set
Speed(120); motor2.set
Speed(120); motor3.set
Speed(120); motor4.set
Speed(120);void loop() if (digital
Read(ir
Left) == 0 && digital
Read(ir
Right) == 0 ) object
Avoid(); //forword else if (digital
Read(ir
Left) == 0 && digital
Read(ir
Right) == 1 ) object
Avoid(); Serial.println("TL"); //leftturn move
Left(); else if (digital
Read(ir
Left) == 1 && digital
Read(ir
Right) == 0 ) object
Avoid(); Serial.println("TR"); //rightturn move
Right(); else if (digital
Read(ir
Left) == 1 && digital
Read(ir
Right) == 1 ) //Stop Stop(); void object
Avoid() { distance = get
Distance(); if (distance
Thư viện
Câu hỏi thường xuyên gặp
Robot dò Line Arduino là một trong những thiết bị tự động hóa có khả năng dịch rời trên một con đường Line trắng đen và tránh vật cản bằng cảm biến siêu âm HC-SR04.
Đồ án giỏi nghiệp Robot dò line là 1 đề tài thú vị đến sinh viên. Với nội dung này, sinh viên rất có thể học được các kiến thức cơ bạn dạng về xây dựng Arduino, cảm biến siêu âm HC-SR04 cùng các cách thức điều khiển robot.
Các bạn cũng có thể mua robot dò line ở các nơi, bao hàm các siêu thị linh kiện năng lượng điện tử hoặc các cửa hàng trên những sàn TMĐT như Shopee, Cytron.














