Cảm đổi thay Accelerometer 3 Trục ADXL345 được sử dụng để đo gia tốc hướng (Accelerometer) hoặc độ rung hễ (tilt) theo 3 trục x, y, z, cảm biến dễ thực hiện với tiếp xúc I2C và không ít code mẫu mã hỗ trợ.
Thông số kỹ thuật:
Nguồn sử dụng: 3~5VDCDòng sử dụng: 30uBạn đang xem: Cảm biến gia tốc adxl345
AĐiện áp giao tiếp: 3~5VDCChuẩn tiếp xúc I2C / SPIMeasuring Ranging: ±2g±16g 43-axis, ±2g/±4g/±8g/±16gCompact Accelemotor/Inclinometer
Low nguồn Consumption
Tài liệu tham khảo:
Sản phẩm thuộc loại

Cảm biến đổi Accelerometer 3 Trục ADXL345
46,000₫
Cảm trở nên Accelerometer 3 Trục MMA8452
37,000₫

Cảm thay đổi góc nghiêng (tilt sensor) SW520
5,000₫

Cảm biến chuyển GY-521 6DOF IMU MPU6050
36,000₫

Cảm biến đổi GY-61 Analog Accelerometer ADXL335
168,000₫
Cảm thay đổi GY-86 10DOF IMU MPU6050 + HMC5883L + MS5611
325,000₫
Cảm biến hóa GY-87 10DOF IMU MPU6050 + HMC5883L + BMP180
185,000₫
Cảm đổi thay GY-9250 9DOF IMU MPU9250
248,000₫
Cảm phát triển thành Gyro 3 trục L3G4200D
48,000₫
Cảm biến chuyển la bàn số HMC5883L
145,000₫
Cảm trở nên la bàn số và gia tốc GY-511 LSM303DLHC
76,000₫
Grove - 3-Axis Digital Accelerometer(±1.5g) (Cảm biến vận tốc 3 trục)
207,000₫
Grove - Rotary Angle Sensor (Cảm đổi thay góc xoay)
69,000₫
Grove - Tilt Switch (Cảm trở nên góc nghiêng)
92,000₫
Mạch cảm biến góc nghiêng Tilt Switch SW520
9,000₫
Tổng quan
Thông tin
Module cảm ứng gia tốc ADXL345 điện áp hoạt động: 3.3VDC / 5VDC, độ phân giải: 10 bit, ánh nắng mặt trời hoạt động: -40 đến +85 °C
————————CODE THAM KHẢO—————————
Thư viện Adafruit_ADXL345_U.h
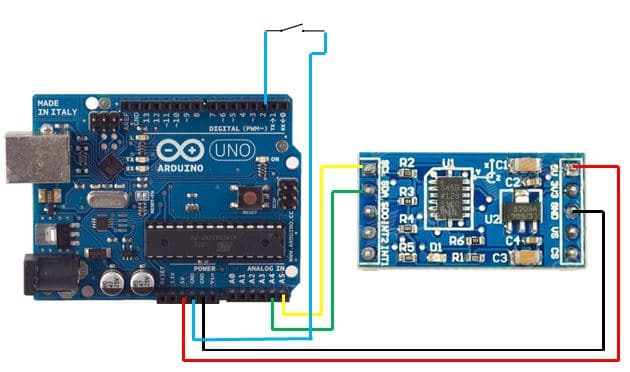
/* * Kết nối: * ADXL345 Arduino * VCC 5V * GND GND * SCL SCL * SDA SDA * */#include #include #include /* Assign a quality ID to lớn this sensor at the same time */Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);float Accel
Xem thêm: Gợi Ý 50+ Món Đồ Để Bàn Làm Việc Giá Tốt, Giảm Giá Đến 40%, Đồ Trang Trí Bàn Làm Việc
MinX = 0;float Accel
Max
X = 0;float Accel
Min
Y = 0;float Accel
Max
Y = 0;float Accel
Min
Z = 0;float Accel
Max
Z = 0;void setup(void) Serial.begin(9600); Serial.println("ADXL345 Accelerometer Calibration"); Serial.println(""); /* Initialise the sensor */ if(!accel.begin()) /* There was a problem detecting the ADXL345 ... Check your connections */ Serial.println("Ooops, no ADXL345 detected ... Check your wiring!"); while(1); void loop(void) Serial.println("Type key when ready..."); while (!Serial.available()) // wait for a character /* Get a new sensor event */ sensors_event_t accel
Event; accel.get
Event(&accel
Event); if (accel
Event.acceleration.x Accel
Max
X) Accel
Max
X = accel
Event.acceleration.x; if (accel
Event.acceleration.y Accel
Max
Y) Accel
Max
Y = accel
Event.acceleration.y; if (accel
Event.acceleration.z Accel
Max
Z) Accel
Max
Z = accel
Event.acceleration.z; Serial.print("Accel Minimums: "); Serial.print(Accel
Min
X); Serial.print(" ");Serial.print(Accel
Min
Y); Serial.print(" "); Serial.print(Accel
Min
Z); Serial.println(); Serial.print("Accel Maximums: "); Serial.print(Accel
Max
X); Serial.print(" ");Serial.print(Accel
Max
Y); Serial.print(" "); Serial.print(Accel
Max
Z); Serial.println(); while (Serial.available()) Serial.read(); // clear the input buffer HÌNH ẢNH SẢN PHẨM:














